Software
for depth estimation
Last Update:
June 6th 2008
This software generates
depth maps for 1D parallel images.
Three stereo images in
YUV 4:2:0 formats are inputted into this software.



Left
image
Center image
Right image
Then the
depth map in PGM format of center image is outputted.

Depth
map
*****************************************************************
Input files
·
View images (YUV 4:2:0
format)
·
Camera parameter file
(Text file)
·
Parameter
configuration file (.cfg file)
Output files
·
Depth map (YUV 4:2:0
video)
·
Znear and Zfar
(Text file)
n
Input/output file format
YUV 4:2:0 video files are inputted or outputted.
n
Camera parameter file
Intrinsic and extrinsic camera parameters are gathered
in a text file. Then, each camera has to be named for identifying them. For
example, cameras which correspond to the view26, view27, and view28 are named
as param_ak26, param_ak27, and param_ak28, respectively. Figure 2 shows an
example of camera parameter file. These parameters have
to be ordered in not increasing order number but camera order from left to
right.
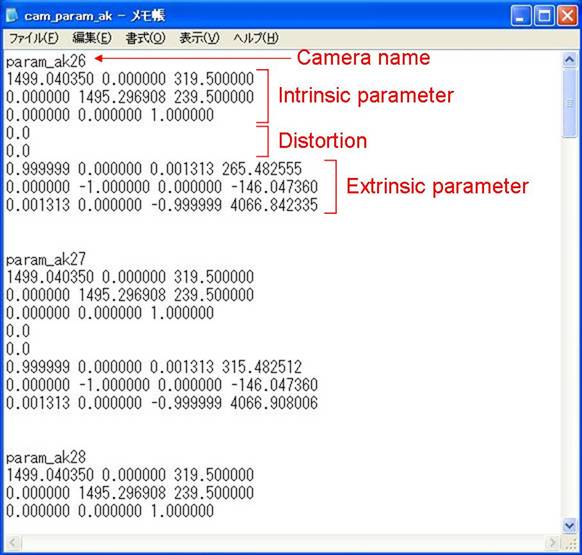
Fig.1 An example of
camera parameter file.
n
Parameter configuration file
Conventional text file for
parameter configuration was replaced by a configuration file (.cfg file). This
file has to be named “DepthEstimation.cfg” and has to be put in the directory
containing DepthEstimation.exe
file. Table 1 shows the parameters which are included in parameter
configuration file. The following 17 parameters are included in the
file.
1.
Depth Type
2.
Width of view image
3.
Height of view image
4.
Total number of frames
5.
Left camera name
6.
Center camera name
7.
Right camera name
8.
Minimum value of disparity search range
9.
Maximum value of disparity search range
10.
Minimum value of disparity range
11.
Maximum value of disparity range
12.
Smoothing coefficient (larger than or equal to
1.0)
13.
File name of left view image (This may include
file path)
14.
File name of center view image (This may include
file path)
15.
File name of right view image (This may include
file path)
16.
File name of output depth map (This may include
file path)
17.
Camera parameter file name
Note: Disparity search range is not always same as all pairs
of views. Changing this range may effects resultant depth maps. This range is determined visually.
Disparity
range
has to include disparity search ranges for all views. Minimum value of
disparity range is smaller than or equal to minimum value of all disparity
search ranges. In the same way, maximum value of disparity range is larger than
or equal to maximum value of all disparity search ranges. Minimum and maximum
values of disparity range correspond to Zfar and Znear
values. Figure 2 shows this relation.
Smoothing
coefficient
is a positive value larger than or equal to 1.0. This
value is chosen experimentally.
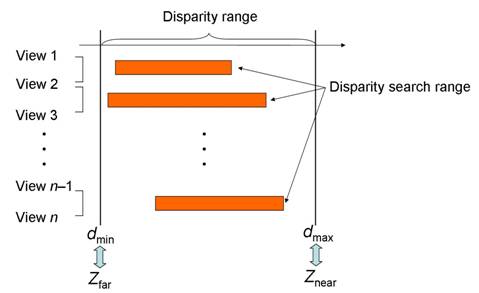
Fig. 2
Relation between disparity search range and disparity range
Figure 3 shows an
example of parameter configuration file.
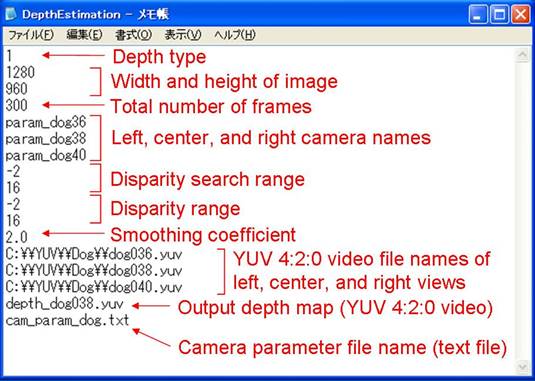
Fig.3 An example of
parameter configuration file.
Depth type
This software is
equipped two types of depth computation mode. One is depth from camera and the
other is depth from the origin of 3D space. That is because there exist the following
two cases: Type I) the direction of camera is opposite to that of the 3D
coordinate, Type II) the direction of camera is same as that of 3D coordinate.
Figure 4 shows the former case. In this case, depth from the origin of 3D space
takes not only positive value but also negative value. On the other hand, depth
from camera is always positive value. Then Type I is selected. Otherwise, Type
II is selected.
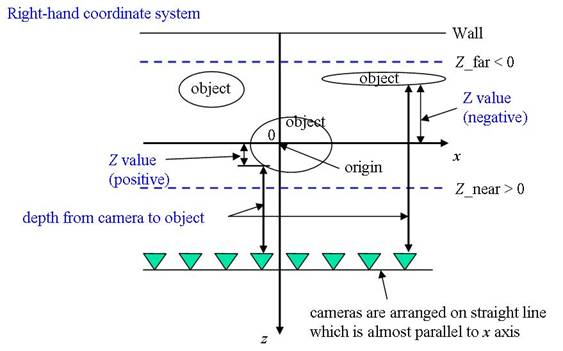
Fig.4
Relation between camera arrangement and 3D coordinate system.
********************************************************************
Usage of
software
DepthEstimation.cfg file has to be put in the
directory containing DepthEstimation.exe file.
If you use this program from command prompt,
please input DepthEstimation.exe and press Enter key. Then depth estimation
starts. If you use this program from Visual Studio, no input into command
prompt is needed.
**************************************************************************
Software
download
Software is distributed
in two forms: binary file and Visual Studio 2005 project file.
You can generate depth
image with binary file “DepthEstimation.exe”
This file can also be
used from command prompt.
To download binary file
[download]
This zip file includes exe
file and related files.
Source code is
distributed as Visual Studio 2005 project file. To compile this project, Visual
Studio 2005 must be installed on your computer.
To download Visual
Studio 2005 project file [download]
**************************************************************************
Acknowledgement
I would like to express
my thanks to MPEG-FTV EE participants who gave us useful and kindly comments
and questions concerning to the first version of our software.
Kazuyoshi Suzuki
If you have a question,
don’t hesitate to mail to
![]()